Nächster Ansatz für den Mittelteil
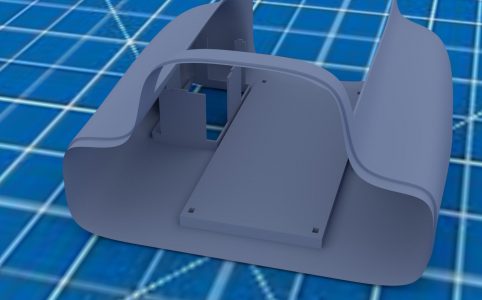
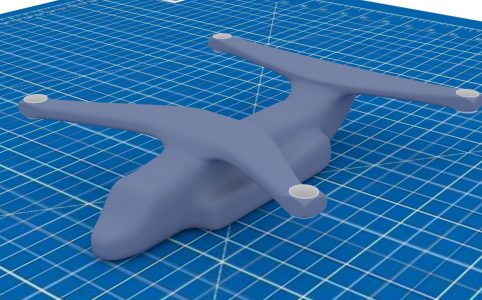
Nach einigem hin und her habe ich mich dazu entschieden, dass ganze Design der dU-22 im unteren Bereich etwas zu verändern und die Rundung an den Auslegern unte...
Nach einigem hin und her habe ich mich dazu entschieden, dass ganze Design der dU-22 im unteren Bereich etwas zu verändern und die Rundung an den Auslegern unte...

Das kam ja wie gerufen! Dank den beiden Mega bin ich jetzt dazu in der Lage, die Fernsteuerung zu planen und zu bauen. Da ich nur noch einen Nano in Reserve hab...
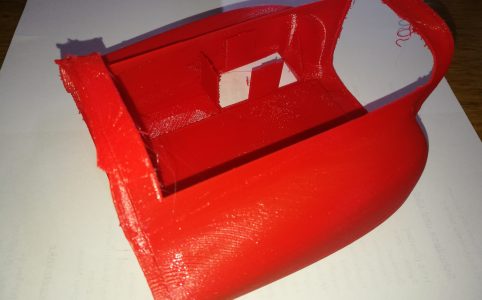
Es fällt mir genau eine Bezeichnung für diesen Ausdruck ein. Er ist ironisch! Warum ironisch? Nun, Meine grösste Sorge galt den Überhängen und Brücken im Modell...

Jetzt sind tatsächlich die Funkmodule angekommen. Mir wäre die Wägezelle zwar immer noch lieber, damit ich mit den Motoren ein wenig experimentieren kann, aber ...
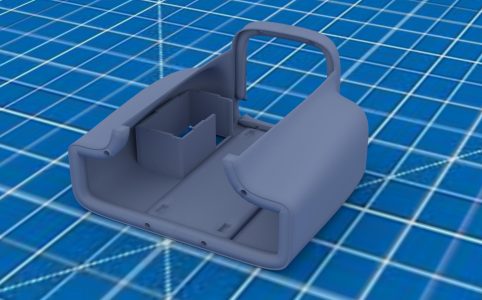
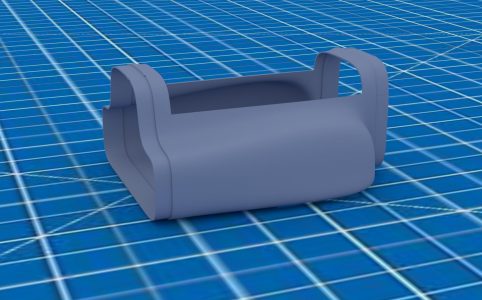
Da ich wohl oder übel einen Probedruck in voller Grösse durchführen muss, habe ich das Innere des mittleren Rumpfs weiter ausgebaut. Sollte der Drucker mich übe...
Da hat wohl mal wieder jemand ohne Plan einfach losgelegt. Dabei wird das doch gar kein OPEL! Eigentlich war geplant, heute eine im Massstab 1:2 verkleinerte Ve...
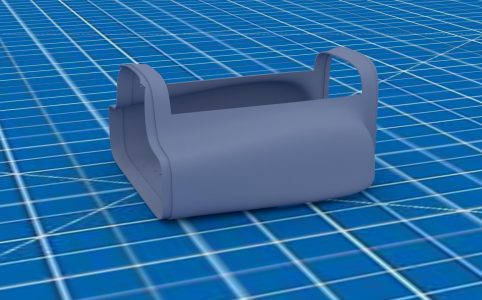
Die derzeit wahrscheinlich schwierigste Phase hat begonnen. Das Zerschneiden des Rumpfes, damit der 3D-Drucker ihn ausdrucken kann. Es gibt so viele Dinge zu be...

Eben kam der Briefträger und hat die Propeller für die dU-22 gebracht! Es sind 10×4,5 (1045R) Propeller, je zwei für rechts und zwei für links. Damit fehle...
Nachdem ich die Motoren vermessen und im Computer nachgebildet habe, konnte ich entsprechende Motorhalterungen dafür konstruieren und in das Modell einfügen. Di...

Heute kam die erste Lieferung der Hardware hier an. Netterweise die Motoren, so dass ich nun das Modell fertig modellieren kann! Bei den Motoren handelt es sich...